Seth Hulst, Engineering Manager, and Loren Kamstra, Design Engineer, Groschopp Inc.

I. Introduction
For electrical and mechanical design engineers in the process of developing applications, choosing a gearmotor can be a tricky and arduous process. Can motors and gearboxes be purchased separately and then matched for an application? Is it better to specify a pre-engineered gearmotor? What are the differences? By following the two gearmotor selection methods readers will receive a checklist of considerations to determine which process would be the most helpful and steps to complete the gearmotor selection processs.
There are many factors to consider when choosing a gearmotor. Whether selecting a gearbox and motor separately or choosing from pre-engineered gearmotors, understanding the issues of the application are essential. These issues include speed and torque requirements, in addition to mechanical and thermal limitations. With over 75 years of history in the motion control industry, Groschopp employs over 20 engineers and many other technical personnel capable of taking on complex motion solutions. As a result of this experience Groschopp shares technical data and processes to help readers to properly determine the best gearmotor for an application.
II. Basics of Motors & Gearmotors
As the gearmotor selection process begins, the designer must gather the relevant technical and commercial requirements and weigh each parameter against the qualities of each available motor type. Some of the basic items to consider include:
Voltage Type (ac or dc) Speed Horsepower Efficiency Product Life Maintenance Noise Speed Regulation Starting Torque
These parameters along with some project specific requirements will be helpful when navigating the selection process.
A. Motor Basics
Four basic motor types will be covered (this article is focused on motion solutions for general use fractional hp motors and associated gearboxes. Additional considerations may be required for applications requiring stepper and servo solutions):
Universal (UM) Brush Type Permanent Magnet dc (PMDC) AC Induction (dc) Brushless Permanent Magnet dc (PMDC).
In order to properly compare the motor options, it is helpful to build a selection matrix. The Motors Quick Reference Guide (Table 1) details each type of motor and provides a general selection matrix. This chart is a good starting point in the motor selection process. It is important to determine which of the parameters (e.g. horsepower, efficiency, life, starting torque, or noise ratings) are most important to the application under consideration. For a custom design, parameters may be added or removed to provide a better application-specific tool for choosing the proper motor technology. Once the key parameters have been weighed and the motor technology selected, the next step is the sizing process.

Table 1: Motors Quick Reference Guide - provides a comparison of common parameters used during the motor selection process
With the motor type selected, the next step is to choose the package size of the motor. For a given output power, the designer must analyze the motor size and speed needed to meet the output requirements. A small motor running at high speed can output the same amount of power as a large motor running at a slow speed. The designer must weigh the application requirements against the general performance of the motor type to determine which frame size best meets the application needs. For example, an application requiring a 200 watt output was analyzed to determine the "sweet spot," or the area where the motor size and speed were best optimized (Figure 1). A 500 cu in. motor must run at 1,000 rpm to meet the power requirements. A general-purpose motor could be run at 100 rpm to meet the specification but the motor would likely be unreasonable for most projects in both size and cost. Selecting a motor in the "sweet spot" allows the designer to choose the ideal motor package size while keeping project costs in check.
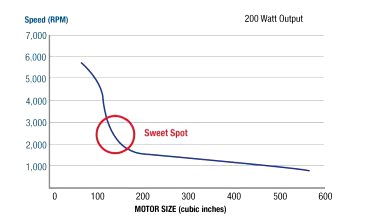
Figure 1: Motor Comparison Graph - an analysis of motor size to meet a 200 watt output
B. Gearbox Basics
Using only the motor size and speed analysis can be problematic because most applications require a specific speed and/or torque to meet the overall power requirements of the application. To keep the ideal package size, a gearbox can be used to reduce the speed and increase the torque to meet design parameters. The aforementioned "sweet spot" illustrates the point where the ratio of size versus motor speed is optimized (Figure 1). Using the correct gearbox allows the designer to optimize the motor while still meeting the required output speed and torque.
Though there are a variety of gearbox options, four specific types will be highlighted: the right angle worm, right angle bevel, planetary, and parallel shaft. Each gearbox type possesses unique design attributes that will dictate the performance of the reducer within the application. It is also important to consider gearing components when making a gearbox choice. The worm, bevel, spur, and helical gearing options complete the reducing process according to their unique design attributes, contributing to the overall gearbox performance.
Similar to the motor selection process, it is important to build a reducer matrix to match the proper gearbox with the specific application. The key reducer parameters to note are duty cycle, maximum input speed, maximum torque, efficiency, noise, limitations, and back drivability (Table 2). While these are common parameters and work well in the initial data-gathering phase, many additional items should be considered before a final gearbox choice is made. It should be noted that the parameters listed in the selection matrix are common guidelines for standard, off-the-shelf products. Custom designs can be tweaked to run outside the normal parameters.
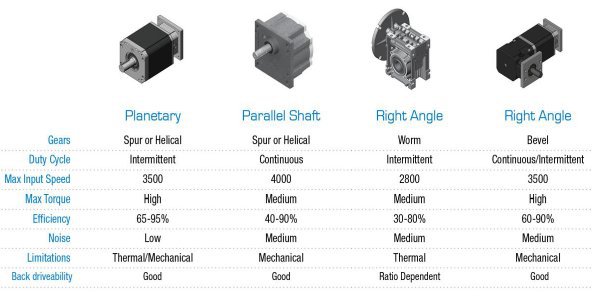
Table 2: Gearbox Quick Reference Guide - compares some of the typical parameters used during the gearbox selection process
Duty cycle, maximum input speed, and maximum torque are three of the most common parameters to consider in the gearbox selection process (Table 2). These values can be easily gathered from the application design inputs and motor outputs. Efficiency is a parameter that becomes critical to meeting performance specifications while optimizing package size. The efficiency of the gearbox is affected by gear quality, ratio, gear type, lubrication, bearing types, and side loading. Generally, higher efficiency is better but high efficiency can also drive cost. Referring back to the criteria listed in Table 2, noise is a very subjective term that is greatly affected by the environment and performance criteria required in the final product. A design that is considered very quiet in a loud industrial setting might sound noisy in a household or subdued setting.
One of the final parameters in Table 2 is limitations. Understanding the limitations of each gearbox is very important in making a gearbox selection. Looking at the parallel shaft and bevel right angle gearboxes, these designs are limited in output torque by the mechanical wear on components (e.g. shafts, bearings, gears, etc.) known as a mechanical limitation (Table 2). On the other hand, the output torque of a worm gearbox is limited by the heat that is generated within the gearbox, known as a thermal limitation. This thermal limitation is directly related to the efficiency and life of the gearbox. Heat generation causes premature life issues with the lubrication which, in turn, affects gear life. High heat is also a sign that the gearbox is not running as efficiently as it could. Looking at the worm gearbox, its general performance shows the lowest efficiency rating of all the gearbox ratings. Surprisingly, a planetary reducer can have both thermal and mechanical limitations, even though it has a high efficiency rating.
Questions that often come up are "What size gearbox should be used for a given torque?" and "How much continuous duty torque can come from a cubic inch of gearbox volume?" The measure of torque per gearbox volume (in-lb/in³) is called torque density.
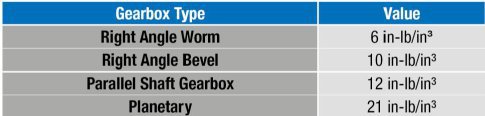
Table 3: Torque Density Comparison - an example of torque density values for a right angle worm, right angle bevel, parallel shaft and planetary gearboxes (torque density values are included for comparison purposes only and will vary depending on ratio and speed)
For example, the worm gear will get about 6 in.-lb of torque per cubic inch of gearbox volume, while the planetary gets about 21 in.-lb of torque per cubic inch – almost 3 times as much for a given output (Table 3). The high torque density of the planetary gearbox indicates that it can be loaded to a relatively high torque in a small package. Higher output torques will generate higher temperatures in a reducer since there is less gearbox volume to serve as a heat sink, dissipating the heat that builds up as a result of the higher output torque. High torque density and a small package size means a planetary gearbox can sometimes be limited by temperature (also dependent upon speed, input and output watts). Evaluating torque density, package size and resulting gearbox volume in the application will ensure an effective gearbox choice that will correctly fit the required form factor of the application.
In addition to the criteria in the Gearbox Quick Reference Guide (Table 2) there are other design criteria that need to be considered in the gearmotor selection process, such as overhung load, envelope size, cost, lubrication, and mounting options. Evaluating these additional specifications will help the designer identify application-specific limitations that can quickly eliminate one or two gearbox types. For example, if the gearmotor will be placed in a tube within the application, a right angle worm gearbox will be eliminated as an option because its form factor does not work well in a cylindrical space.
C. Putting It All Together
There are wide ranges of motor sizes and gearbox ratios that can be combined to achieve a specific output torque (in.-lb) and a speed (rpm). With so many options, how does a designer determine which combination to select? Choices must be based on the primary constraints indicated by the application. For example, if cost is the main concern then a smaller motor might be the best choice. But there is a trade-off; a smaller motor running at higher speeds with a higher ratio gear reducer might be noisier. Also, keep in mind that some gearbox types have higher costs at the larger ratios due to the extra gear stages; in these cases gearbox cost may actually outweigh the cost savings of the smaller motor. These types of trade-offs need to be evaluated when determining the "perfect gearmotor match." Usually the optimal design is not on either end of the spectrum in terms of motor size and gearbox ratio, but rather somewhere in the middle. It is critical to weigh the design constraints to find an acceptable solution.
III. How to Select a Gearmotor: Two Methods
A. Overview
Conceptually, motors and gearboxes can be mixed and matched as needed to best fit the application, but in the end, the complete gearmotor is the driving factor. There are a number of motors and gearbox types that can be combined; for example, the right angle worm, planetary, and parallel shaft gearboxes can be combined with permanent magnet dc, ac induction, or brushless motors. Though there are vast arrays of different motors and gearboxes available, not just any combination will work for the application. There will be certain combinations that will be more efficient and cost-effective than others. Knowing the application and having accurate ratings for the motor and gearbox is the foundation for successfully integrating the gearmotor into the system. Choosing the right gearmotor combination requires that the designer know the application. Gathering the information in the Application Checklist (Table 4) will provide the designer with the proper background knowledge to begin the selection process.
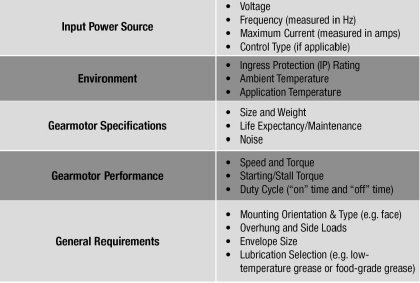
Table 4: Application Checklist - use this checklist to help formulate the specific requirements to ensure the gearmotor vendor has the critical information necessary to achieve the best match between the gearmotor and the application
There are two methods for selecting a gearmotor.
1. Select a motor and a gearbox separately and then couple the two together.
2. Select a pre-engineered gearmotor.
B. Method 1: Select a Motor, Select a Gearbox and Couple Together
To obtain a well-matched gearmotor, start by choosing a gearbox that will provide the right speed and torque output for the application, and then select the appropriate motor to meet output performance. Once the motor has been selected, a calculation needs to be made for the actual speed, torque, and efficiency. Assuming the Motor and Gearbox Quick Reference Guides have been followed to make some basic motor/gearbox type selections, use the vendor data for those components to make the calculations. More often than not, the whole process may require several iterations to determine the optimal gearmotor combination.
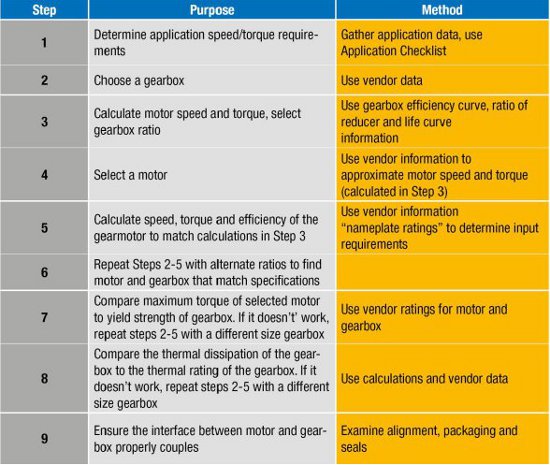
Table 5: Method 1 Process – select a gearbox, select a motor, and ensure matching interfaces
Step 1: Determine Application Requirements: Determine required speed and torque for the application. Evaluate optimum operational speed and then determine what torque is required to meet the needed performance. This information is gathered as part of the Application Checklist (Table 4).
Step 2: Choose a Gearbox: Given the application performance requirements, the designer must start gathering information in order to select a proper gearbox. This step often requires the designer to collect many data sheets from various suppliers to determine which design will best handle the output torque required. The amount of torque produced from the gearbox is dependent on the Requirements for Selecting a Gearbox.
Requirements for Selecting a Gearbox:
Life Curve Efficiency Curve Thermal Capacity Maximum input speed
The gearbox specifications will be used to determine whether a gearbox's output torque is limited by thermal or mechanical constraints.
A. Life Curve: The first step to determining output torque is matching the application life requirements to the appropriate gearbox by analyzing the life curves provided by the manufacturer (many manufacturers only give points on the curve, not the curve itself). These curves will illustrate the load a gearbox can withstand over time based on the mechanical strength of its components. The time range on these curves will vary from manufacturer to manufacturer, depending on gearbox type and testing protocols. The life curve gives the gearbox's yield strength, the torque at which the reducer will experience instantaneous failure (Figure 2). Side loading is a major factor that can affect gearbox life. Internal stress on gearbox bearings and excess temperature must also be accounted for in the design process.
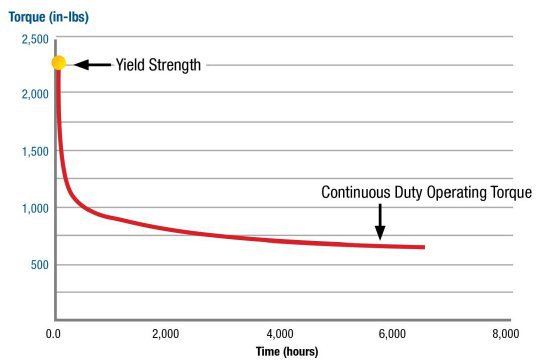
Figure 2: Life Curve - the life curve is the theoretical curve of the gearbox life vs load
B. Efficiency Curve: It is important to take a look at the efficiency curve (Figure 3) which may also be provided by the manufacturer. The efficiency curve is used to understand efficiency at a given torque value. Note that efficiency is not always consistent with torque; selecting a gearbox that is too large for the application will force the gearbox to operate in the inefficient range of the curve. It is best to select a gearbox that will operate at peak efficiency in the continuous torque region for the application. Efficiency and torque are used to calculate the torque capacity of the gearbox from a thermal perspective and are integral in selecting the proper motor size.
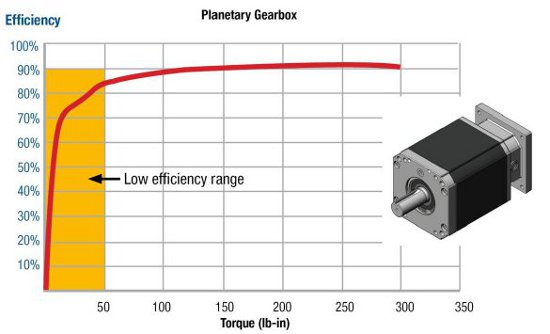
Figure 3: Efficiency Curve - the data for gearbox efficiency vs the output load
C. Thermal Capacity: The next step is to determine the amount of heat the gearbox can dissipate at the maximum allowable gearbox temperature. This is known as the maximum allowable dissipated energy, or heat. The heat generated in the gearbox is a function of its efficiency at the desired speed and load and is determined through testing. Once the maximum allowable dissipated heat is determined, the dissipated watts or energy will need to be calculated at the application load point. Excessive heat and noise are losses and reduce the gearbox's ability to handle the load.
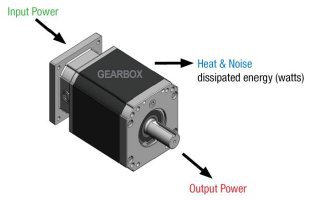
Figure 4: Gearbox Losses - input power is lost through heat and noise (watts), reducing output power
The goal is to compare the calculated dissipated watts to the vendor's specified maximum allowable dissipated watts and ensure that the calculated watts do not exceed the maximum allowable watts specified by the manufacturer (Figure 4). First, the output power (in watts) is calculated using the speed and output torque requirements of the application. Then, using the efficiency curve, the dissipated watts are calculated to confirm that the value does not exceed the vendor's specifications.
D. Maximum Input Speed: Each manufacturer should provide data regarding the range of input speeds the gearbox was designed to handle. The maximum input speed should be noted in the datasheet and will provide a guideline for the input required to meet the manufacturer's published performance characteristics.
All of the key performance data needed to complete Step 2 have been collected in order to select a properly sized gearbox. Information has been gathered that will allow the designer to consider the gearbox limitations including efficiency, yield strength, continuous duty torque, and thermal capacity. Using this data, a suitable family of gearboxes can be selected to effectively fit into the application if matched with the correct motor.
Step 3: Calculate motor speed and torque, select gearbox ratio: Now that a gearbox has been selected, the application's specification for performance, along with the gearbox performance data, can be used to determine the proper gearbox ratio and the required performance of the motor. The motor speed and motor torque equations are used to calculate the "perfect match" motor output.
Both the motor speed and motor torque equations are impacted by the gearbox ratio. When it comes time to select a motor, the results of the equations could lead to the selection of a larger, slower motor than is needed for the application. By simply increasing the gearbox ratio, the motor size can be reduced. As the design process unfolds, it becomes clear that in order to select the gearbox ratio the designer must have some understanding of what motor outputs are generally acceptable.
Step 4: Selecting a Motor: Following the selection of the gear ratio and the calculation of required motor performance, it is time to dig into the datasheets once again to see what motor best fits the needs of the application. There are several key requirements to gather and review.
Requirements for Selecting a Motor:
Nameplate speed and torque of the motor Efficiency / Torque curve Speed / Torque curve Breakdown torque (applicable to ac motors only) Pull-up torque (applicable to ac motors only)
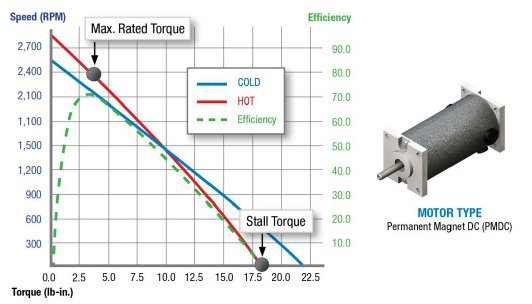
Figure 5: Motor Performance Curves - the Speed / Torque and Efficiency / Torque curves for a permanent magnet dc motor (PMDC)
Typically, vendors will mark the rated speed and torque on the curve, which will show the maximum allowable continuous duty torque for the motor. This continuous duty rating usually corresponds very closely with the peak efficiency of the motor. Running the motor at greater loads will require the motor to run at an intermittent duty cycle to prevent overheating.
On the Speed / Torque and Efficiency / Torque curves (Figure 5), the red (hot) performance line shows that the motor can run at 2,400 rpm at 3.75 in.-lb of torque, with a corresponding efficiency of about 70%. The maximum rated torque and speed are determined by the motor manufacturer's testing at a given voltage. This rating is limited by the temperature rise, which is typically dictated by the UL class. The "hot curve" is used for the calculations here because these values will simulate real-life operating conditions. Failure to take heat into consideration is one of the common mistakes that can cause the system to perform incorrectly.
Step 5: Calculate Speed, Torque, and Efficiency of the Gearmotor: Now that the motor has been selected, the actual outputs of the gearmotor must be calculated. Starting with the required motor torque from step 3, the corresponding motor speed from the motor speed / torque curve must be gathered from the motor vendor data sheet. Using this motor speed, the actual application gearmotor speed can be calculated by dividing the motor speed by the gear ratio.
Step 6: Compare Multiple Gear Ratios: The designer will need to iterate through steps 2 through 5 in order to compare multiple designs with different gear ratios. Once a sufficient number of designs have been analyzed, the gearmotor can be selected.
Step 7: Analyze Gearbox Strength: Following the selection of a design that meets the output performance, an analysis of the gearbox must be made to ensure that it will meet the life requirements by reviewing vendor data. If the selected gearbox does not match the requirements for yield strength and continuous loading, the designer must repeat steps 2-5.
Step 8: Review thermal characteristics of the gearbox: Finally, the gearbox should be evaluated and the vendor data reviewed to ensure that it will not overheat in the application. If there are any concerns the designer must once again iterate steps 2-5 in the design process.
Step 9: Mechanical Interface: After selecting the motor and gearbox for the application, the interface must be designed to rigidly couple the components together. Care should be taken in order to ensure the interface provides proper alignment, packaging, and sealing to meet application needs.
C. Method 2: Select a Pre-Engineered Gearmotor
Method 1 portrayed the complexity of selecting and then matching a motor and gearbox. By selecting a pre-engineered gearmotor, the manufacturer has completed most of the heavy lifting by determining the calculations below.
Thermal characteristics Full-load gearbox torque Gearbox input speed Gearbox yield strength Breakdown torque (ac motors) Pull-up torque (ac motors) Intermittent duty considerations
Since performance calculations and testing have been performed by the manufacturer, gearmotor failures caused by miscalculations or improper component matching will be minimized.
Method 2 takes a lot of the guesswork out of buying a gearbox and a motor and trying to couple them together. All of the requirements are taken into consideration with a pre-engineered gearmotor because the components have been matched and tested for a known, quantifiable, result.
Method 2 starts the same way as Method 1 by first determining the speed and torque requirements. Based on the speed and torque determined for the application, the designer can simply select a gearmotor from the vendor's gearmotor curves.
It is important to ensure that the gearbox yield strength can handle the peak application load so as not to damage the gearbox. In the case of ac motors, make sure that the application starting torque does not exceed the motor pull-up torque. In general, Method 2 is a much easier and certainly a less risky way to select a gearmotor.
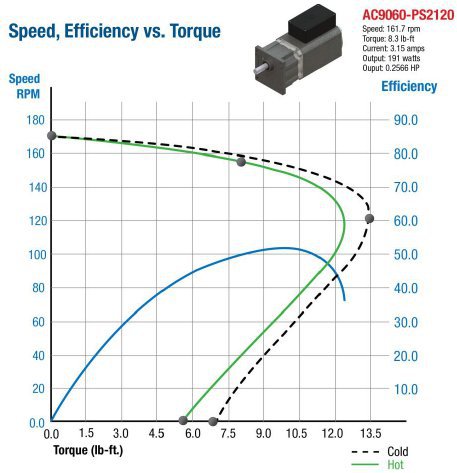
Figure 6: Gearmotor Performance Curves - the Speed / Torque and Efficiency / Torque curves for an ac gearmotor
The gearmotor curve (Figure 6) combines the performance of the motor and gearbox together by displaying torque and efficiency. If a complete gearmotor assembly is purchased from a manufacturer the curve is provided by the vendor. When the two components are acquired separately, a gearmotor curve needs to be created as shown in Method 1. To create a gearmotor curve, points need to be calculated throughout the load range and plotted to achieve a curve of the gearmotor's performance. That is one of the advantages of selecting a pre-engineered gearmotor: the work has already been done by the manufacturer.
The gearmotor vendor calculations should also address intermittent duty applications. Calculations for an intermittent duty application were not explained in Method 1 because the data needed to make these calculations is usually difficult to obtain when the motor and gearbox components are purchased separately.
IV. Common Mistakes & How to Avoid Them
Knowing the application can mean the difference between a gearmotor functioning properly and one that overheats or has problems. Several common mistakes made when selecting a gearmotor include:
1. Underestimating Peak Requirements: Underestimating peak requirements can cause a motor to overheat or result in gear damage. This is the most common reason for gearmotor failure.
2. Elevated Ambient Temperature: Most vendor information is provided based on a single ambient temperature. If the operational conditions of the application require a higher ambient temperature than that of the vendor test data, three possible outcomes exist:
The motor may burn up Bearing life could be reduced Gear life could be reduced due to a breakdown in the lubrication system.
3. Improper Application of a Control: If the application requires a control, special consideration should be made to ensure that the motor and control match properly. Improper application of the control can cause the motor to overheat. Take into account that controls can add inefficiencies to a system. Motor ratings depend on the type of control applied and can contribute to the motor overheating. Research the control ratings and compensate for inefficiencies by adjusting the motor size.
About the Authors: Engineering Manager, Seth Hulst and Design Engineer, Loren Kamstra have more than 25 years of combined experience in motor, gearmotor and motion system design for world-class OEM applications.





